Lietuvos chirurgija ISSN 1392–0995 eISSN 1648–9942
2019, vol. 18 (1), pp. 38–40 DOI: https://doi.org/10.15388/LietChirur.2019.18.6
Salpingoovarektomija, naudojant Senhance® robotinę sistemą: klinikinis atvejis
Raimondas Šiaulys
Ginekologijos skyrius, Akušerijos ir ginekologijos departamentas, Klaipėdos universitetinė ligoninė, Lietuva
Department of Obstetrics and Gynecology, Klaipėdos University Hospital, Lithuania
rsiaulys@hotmail.com
Santrauka. Straipsnyje aprašoma vienpusės sapingovarektomijos operacija, naudojant Senhance® robotinę sistemą. Aptariama operacijos atlikimo technika, nurodomi privalumai, pateikiami rezultatai.
Reikšminiai žodžiai: salpingoovarektomija, robotinė chirurgija, Senhance® robotinė sistema.
Salpingoovarectomy Using Senhance® Robotic System: a Case Report
Abstract. A case of salpingoovarectomy using Senhance® robotic system – surgery technic, benefits and results are described in this article.
Key words: salpingoovarectomy, robotic surgery, Senhance® robotic system.
Received: 2019/04/01. Accpeted: 2019/04/23
Copyright © 2019 Raimondas Šiaulys. Published by Vilnius University Press
This is an Open Access article distributed under the terms of the Creative Commons Attribution Licence, which permits unrestricted use, distribution, and reproduction in any medium, provided the original author and source are credited.
Įvadas
Robotinių technologijų įdiegimas chirurgijoje pirmame XXI amžiaus dešimtmetyje sukėlė tikrą perversmą. Koncepcija radosi Jungtinių Amerikos Valstijų Gynybos departamento Stanfordo tyrimų institute, bendradarbiaujant su Nacionaline aeronautikos ir kosmoso tyrimų agentūra (NASA) [1]. Prototipo robotinės rankos buvo pritvirtintos ant šarvuoto transporto, kad galėtų atlikti pirmuosius chirurginius veiksmus mūšio lauke. Vėliau prototipo pagrindu sukurta gerai žinoma Da Vinci® robotinė sistema. Šiame straipsnyje pristatomas salpingoovarektomijos, naudojant Senhance® robotinę sistemą, atvejis.
Klinikinis atvejis
48 m. pacientė stacionarizuota į Klaipėdos universitetinės ligoninės Ginekologijos skyrių dėl kairės kiaušidės cistomos. Praeityje moteris keturis kartus operuota: atliktos dvi laparotomijos ir dvi laparoskopijos (tris kartus – dėl negimdinio nėštumo, vieną kartą – dėl kiaušidės cistos apsisukimo). Pacientė tirta bimanualiai, atliktas vaginalinis ultragarsinis tyrimas. Kairės kiaušidės projekcijoje rastas daugiakamerinis, lygiomis, bet ne vienodo storio sienomis 7 cm skersmens cistinio tankio darinys. Kiaušidžių vėžio žymuo (Ca 125) – 15,2 U/ml.
Kiti biocheminiai, kraujo ir krešėjimo tyrimų rezultatai neperžengė normų ribų. Gydytojų konsiliumas pacientei rekomendavo robotinės salpingoovarektomijos operaciją.
Chirurginė technika
Operacijos metu naudotos trys robotinės rankos: viena – 3D 10 mm kamerai, dvi – 5 mm skersmens instrumentams. Iš viso naudoti keturi standartiniai laparoskopiniai troakarai: vienas – 10 mm, trys – 5 mm skersmens. Troakarų pozicijos – tipinės, kaip ir laparoskopijos metu: supraumbilikalinis pjūvis – optikai, lateraliniai pjūviai – roboto rankoms ir asistentui. Operacijos metu taikyta bendroji anestezija, pacientė paguldyta į Trendelenburgo padėtį. Pasiekus reikiamą pneumoperitoneumą (12 mmHg), supraumbilikaliai įvesta 10 mm 0 laipsnio aukštos raiškos 3D optika. Vizualiai kontroliuojant, įvesti likę troakarai ir, padedant instrumentatorei bei asistentui, atlikta instrumentų prijungimo prie robotinių rankų procedūra (angl. docking), nustatytas atspirties taškas (angl. fulcrum point). Atspirties taškas nustato sensoriškai idealų pilvo sienos storį ir neleidžia atlikti pavojingų judesių. Patikrinta galima maksimali robotinių instrumentų judesių amplitudė, įvertinta, ar nėra jų kolizijos (angl. limited motion). Robotiniams instrumentams naudotos bipoliarinės žnyplės kairėje ir monopoliarinės žirklės dešinėje. Prireikus šie instrumentai greitai ir lengvai sukeičiami vietomis arba pakeičiami kitais. Asistentas naudojo įprastines laparoskopines atraumatines griebiančias žnyples.
Operacijos metu rasta riestinės žarnos sąaugų su pilvo siena, iš dalies dengiančių kairiuosius gimdos priklausinius. Sąaugos išdalytos naudojant robotines žirkles. Rastas 7 cm skersmens kairės kiaušidės cistinis darinys. Dešinėje kiaušintakio nerasta. Dešinė kiaušidė ir gimda – vizualiai nepakitusios. Kairė salpingoovarektomija atlikta identiškai laparoskopinės operacijos technikai: atvertas kairysis retroperitoninis tarpas, vizualizuotas kairysis šlapimtakis, koaguliuotas ir perkirptas kairysis kiaušidės pakabinamasis raištis kartu su kiaušidės arterija ir vena (žr. 1 pav.), kairysis kiaušidės nuosavasis raištis ir kairysis kiaušintakis. Kairysis gimdos priklausinys iš pilvo ertmės pašalintas su endomaišeliu per supraumbilikalinę troakaro angą (žr. 2 pav.). Pilvo ertmė nedrenuota.
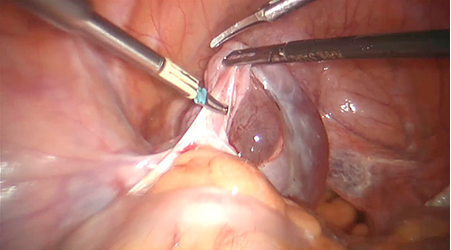
1 pav. Kairysis kiaušidės pakabinamasis raištis koaguliuotas ir perkirptas kartu su kiaušidės arterija ir vena
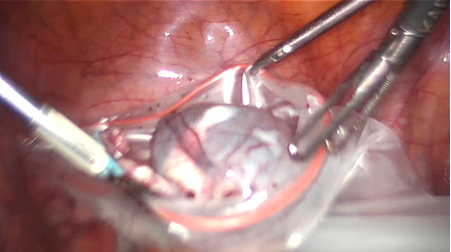
2 pav. Kairysis gimdos priklausinys iš pilvo ertmės pašalintas su endomaišeliu per supraumbilikalinę troakaro angą
Rezultatai
Operacijos trukmė (nuo pirmo supraumbilikalinio pjūvelio iki tvarsčių) – 45 min. Instrumentų prijungimo laikas (angl. docking time) – 9 min. Nukraujavimas – mikroskopinis (pilvo ertmė neplauta ir nedrenuota). Preparato histologinis ištyrimas – kiaušidės serozinė cistadenoma. Naviko morfologinis kodas – M8441/0. Pacientė geros būklės išleista iš ligoninės antrą pooperacinę parą.
Diskusija
Da Vinci® robotinė sistema pirmą kartą pritaikyta kardiochirurgijoje, bet šios sistemos populiarumas labiausiai išaugo pradėjus ją naudoti urologijoje, ypač prostatos chirurgijoje. Vėliau Da Vinci® robotinę sistemą kasdienėje praktikoje pradėjo taikyti ir ginekologai. J. D. Writh’as su bendraautoriais [2] nurodo, kad per trejus metus roboto asistuojamų histerektomijų skaičius išaugo nuo 0,5 iki 10 proc. Turint omenyje, kad Jungtinėse Amerikos Valstijose kasmet atliekama daugiau negu 500 000 histerektomijų, robotinių operacijų skaičius – įspūdingas.
Kitos robotinės ginekologinės chirurgijos indikacijos: miomektomijos, salpingoovarektomijos, cystektomijos, endometriozės operacijos, limfanodektomijos [3].
Pagrindinės kliūtys plačiau naudoti minėtą technologiją – aukšta procedūros kaina ir ilga chirurgo mokymo(si) trukmė. Šių kliūčių išvengta į praktiką įdiegus Senhance® robotinę sistemą, kuri realizuoja galimybę naudoti instrumentus daug kartų ir leidžia pritaikyti chirurgo laparoskopinių operacijų patirtį [4–5].
Išvada
Salpingoovarektomija, naudojant Senhance® robotinę sistemą, – metodas, saugus pacientei, net jei tai ne pirma chirurginė intervencija, ir labai patogus chirurgui. Pagal operacijos trukmę šis metodas beveik identiškas laparoskopinei procedūrai.
Literatūra
1. Satava RM. Robotic surgery: from past to future – a personal journey. Surg Clin North Am. 2003; 83(6): 1491–1500. https://doi.org/10.1016/s0039-6109(03)00168-3
2. Wright JD, Ananth CV, Lewin SN, Burke WM, Lu YS, Neugut Al, Herzog TJ, Hershman DL. Robotically assisted vs laparoscopic hysterectomy among women with benign gynecologic disease. JAMA 2013; 309(7): 689–698. https://doi.org/10.1001/jama.2013.186
3. Kim YT, Kim SW, Jung YW. Robotic surgery in gynecologic field. Yonsei Med J. 2008; 49(6): 886–890. https://doi.org/10.3349/ymj.2008.49.6.886
4. Gidaro S, Buscarini M, Ruiz E, Stark M, Labruzzo A. Telelap Alf-X: a novel telesurgical system for the 21st century. Surg Technol Int. 2012; 22: 20–25.
5. Gueli Alletti S, Rossitto C, Fanfani F, Fagotti A, Constantini B, Gidaro S, Monterossi G, Selvaggi L, Scambia G. Telelap Alf-X-assisted laparoscopy for ovarian cyst enucleation: report of the first 10 cases. J Minim Invasive Gynecol. 2015 Sept–Oct; 22(6): 1079–1083. https://doi.org/10.1016/j.jmig.2015.05.007